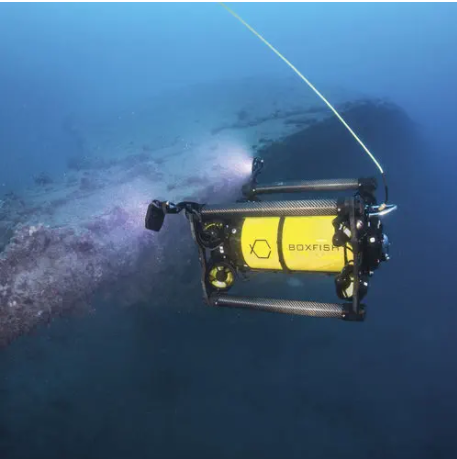
Il ROV (Remotely Operated Vehicle) possiede come funzione principale quella di consentire ad un operatore in superficie di interagire con l’ambiente sottomarino senza esporsi alle sue insidie.
Lo sviluppo di robot è molto importante, soprattutto si esplicita come “le macchine” possano sostituire, o integrare, il lavoro dell’uomo in situazioni estreme. Inoltre il controllo in remoto può permettere a tecnici, in quel momento distanti fisicamente dal luogo dove avviene l’operazione, di gestire e di controllare le fasi della missione stessa.
Un compito così complesso può essere scomposto in molte attività estremamente differenti.
Tra le principali attività possiamo trovare:
- controllare il funzionamento dei propulsori per consentire un assetto ottimale durante l’immersione e il conseguente spostamento in profondità
- acquisire i dati dei sensori di bordo e filtrarli, per ottenere informazioni affidabili sull’ambiente circostante il veicolo
- determinare, sulla base della posizione stimata e dei comandi ricevuti dai livelli superiori, una sequenza di assetti e movimenti da fare assumere al veicolo.
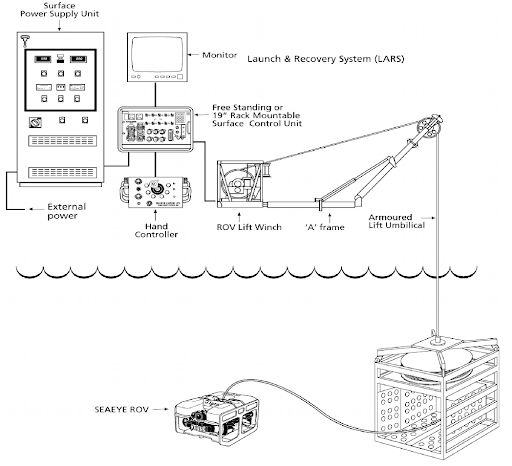
La divisione dei compiti fra il sistema sottomarino e quello di superficie è abbastanza elastica.
Infatti se è certo che il sistema sottomarino si deve occupare di controllare i propulsori, acquisire i sensori e controllare gli impianti di bordo, è altrettanto assodato che il sistema di superficie deve acquisire i comandi dell’operatore e presentargli la situazione del veicolo, i vari compiti di controllo della guida e della navigazione (raggiungimento dei punti della traiettoria) possono risiedere sia nell’unità sottomarina sia in quella di superficie.

I programmi che si utilizzano nell’unità sottomarina, così come nelle altre unità di superficie, sono sviluppati direttamente dai costruttori del ROV in quanto non esistono “pacchetti software” per il controllo di un robot sottomarino.
Tranne i casi più semplici di veicoli per basse profondità, il cavo avrà comunque una lunghezza minima di alcune centinaia di metri.
Internet, d’altra parte, ha permesso e permetterà sempre più lo sviluppo di questo tipo di applicazioni non solo in quanto consentirà, come detto, di avere un robot telecomandato a distanza, ma anche perché aumenterà sempre più la facilità di collegare fra loro in rete un certo numero di robot che potranno così svolgere attività più complesse.
Stefano Agnini
Staff tecnico camere iperbariche


{kind=link}
{kind=link}
{kind=link}
Il Centro Iperbarico di Bologna si impegna a proteggere e rispettare la privacy degli utenti: le informazioni personali raccolte vengono utilizzate solo per amministrare gli account e fornire i prodotti e servizi richiesti. Gli utenti potrebbero essere contattati con suggerimenti su prodotti, servizi o altri contenuti che a nostro giudizio potrebbero essere di loro interesse.
Puoi annullare l'iscrizione a queste comunicazioni in qualsiasi momento. Per ulteriori informazioni su come eseguire questa operazione, consulta le nostre normative sulla privacy e altre indicazioni su protezione e rispetto della privacy, leggi la nostra Informativa sulla privacy.